The purpose of this DLL is to move a part along an axis until the first of multiple mating points comes into contact.
Example Model:C:\Users\Public\Documents\DCS\3DCS_V5_8_2_0_0_win64\3DCS CAD & Example Models\Reference Models\Moves\Contact Translation DLL\DLL_Multipttrans.wtx
|
Inputs:
•Object Points 1 and 2: Two points defining the axis on the object.
•Target Points 1 and 2: Two points defining the axis on the target.
•Object Points 3…n: The mating points on the object.
•Target Points 3…n: The mating points on the target.
•One vector direction used to measure the distance between the pairs of points.
•The part to be moved
Outputs:
The object axis is moved along the target axis until 'high point contact' is made using the remaining points.
Process:
The object is moved to the target axis using a two point move. A check is made between pairs of points (3 through n), from object to target, in the direction of the vector. The part is translated, along the axis, until it finds the smallest positive (or zero) distance between object and target points (measured in pairs along the direction of the vector).
Illustration:
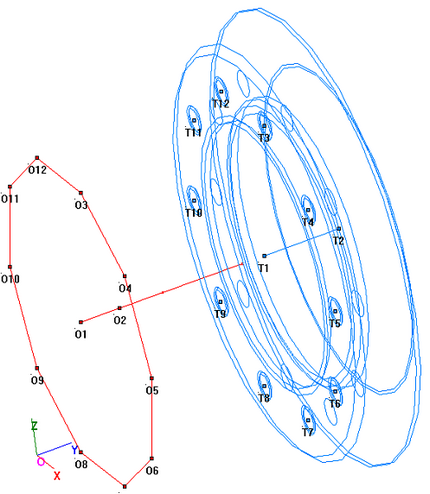
Example Model: Removes interference with the surface contact and locates the object to the target high point.
Move: The move should have one direction added and set to the Y-Direction (0,-1,0).
Tolerance: The Tolerance named: SurfTol2Dif is defined on the Assembly or the diametrical points. This tolerance will simulate form variation on the plate.
Notes:
This tolerance causes the set of points on the deviate as Form but locates the Object surface to the Target point's Highest position.
For best results, the Move Direction is set to Normal and in -Y Direction.
The direction is very important for the move. In this example, the Normal direction was selected in the counterclockwise pattern, if looking in the positive Y direction. The points defined will establish a negative Y direction for the move, locating the Object (RGPitchApex) to the Target (dll_multipttrans, Root), preventing interference.