Joining Type Mode is included in Clamp and Join routines, and has the following settings:
Moves object point along the set vector (Target associated Direction, or a set by the user Type-In direction)
As soon as the target-object distance equals zero along the move vector, the object point stops moving and it’s set relative to the target plane in all directions and all rotations. In other words, the other 5 DOFs are set to zero. Nodes rotations are controlled by the 6DOF stiffness matrix or by the mesh itself if a solid mesh is used.
1B. Target Plane for Join
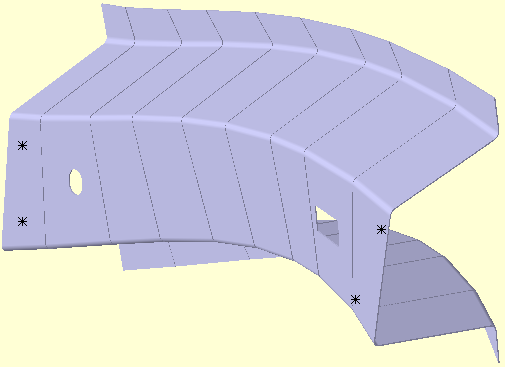
During joining operation the object point is moved along the target point direction until it reaches the target plane. At that moment the gap between target plane and object point along the target associated direction is zero. Next step is the spring-back which moves both target and object point to reach equilibrium based on the two part's stiffness matrices (which after the join move are combined).
Note: During the spring-back the target point's vector may change and as a result will be different then the one used to bring the object point to the target plane.
Moves object point along the set vector direction.
As soon as the target-object distance equals zero along the move vector, the object point stops moving and it’s set relative to the target plane only along the clamp move direction. The point is free to move in the other two directions and rotate in all three directions. The deformation in the other five DOFs is not constrained by this move. This means that a subsequent compliant move can shift the object point relative to the target point while maintaining the zero-distance in the move direction. Soft clamp does not generate a moment at the clamp point, so the soft clamp can be replaced by exerting force. In other words soft clamp has only one force component: along the move vector. No other forces are applied with a soft clamp. No moment is applied with a soft clamp.
3. Coincident for Clamp and Join
Each Object point is attached to the corresponding Target point. Object points will be coincident to the target points, after executing the move. No direction is used in the move.
4. Tie - Only for Join
Will maintain relationship between the paired points in all 6DOF without deforming the parts. Move points added to the Tie will not change their Nominal position relative to each other whether there is an initial gap between them or not. Tie is the equivalent of a rigid element used in FEA software.
For example the Rail shown in the picture below will be clamped to a Fixture using four pads. The Object points on the Rail are not coincident with the Target points on the Fixture:
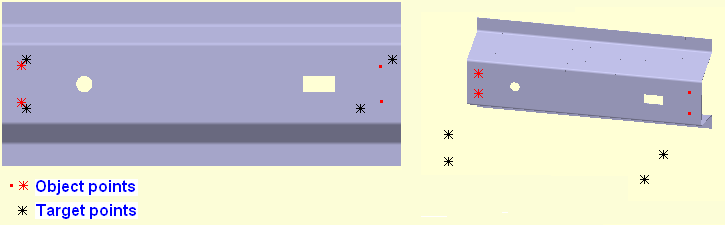
A.) If Hard (All DOF) for Clamp (Target Plane for Join) is used, the two surfaces will come in contact along the target points vector direction. The object points will line-up with the target points only in the direction of the move.
Note: For Soft 1DOF at least 6 points must be used to constrain the part in all three degrees of freedom. The 6 points can be constrained in the same clamp move, or a combination of LockDOF/clamp moves can be used.
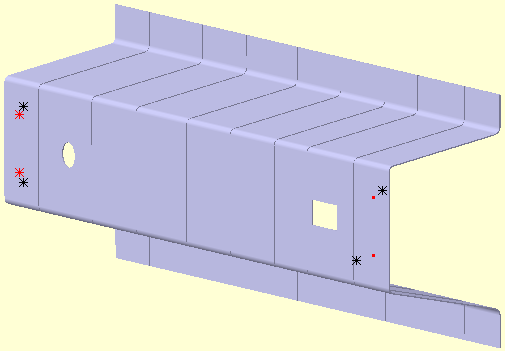
B.) If Coincident option is selected, the object will deform such that each object point will be coincident with the corresponding target point.