XI. Clamp the Base (Clamp_Base_2_AsmFix_A1-A3_seq_inf)
Purpose and usage:
•Clamp is applied between two flexible parts or one flexible and one rigid part, but only the Object part deforms, the Target will always be considered rigid.
•Clamping is not a permanent operation.
•Clamping has Direction and Joining Type that must set by the user.
•Clamping Direction can be:
Target Associate which translates the object point along the target point vector.
Type-in which translates the object point along the direction set by the user.
•Joining type can be:
Soft (1DOF) applies unlimited force on the object part, deforming it to the target part. Object point is then fixed in only 1DOF and can slide along the target plane in subsequent CM operations. There is no friction at the clamped point so the part can slide freely unless otherwise constrained.
Hard (All DOF) applies unlimited force on the object part, deforming it to the target. Object point is then fixed in all degrees of freedom specified in the stiffness matrix file and can no longer move.
Coincident applies unlimited force on the object part, deforming the object part until the object point is coincident with target point. Object point is then fixed in all degrees of freedom specified in the stiffness matrix file and can no longer move.
Things to know about clamping:
=> Clamped nodes can be used in other compliant moves only after they are Unclamped.
=> For Clamping routine the normal tree priority doesn't apply. When a part/assembly has been clamped 3DCS will remember the part it's clamped until an Unclamp routine is defined.
=> If target part is a flexible part, in Clamping will be considered rigid and it will not flex. A warning message will be added in the Run Log for the user.
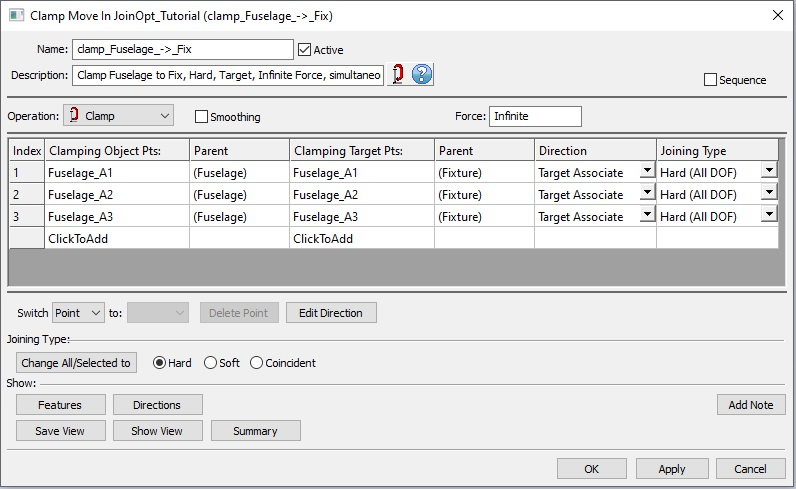
9.1 Points A1_Base, A2_Base and A3_Base will be clamped using Infinite force in Sequence to the AsmFixture using Target Associate direction and Hard (All DOF) joining type.
9.1.1 Select the![]() Clamp icon and choose the CMRailAsm product as parent part.
Clamp icon and choose the CMRailAsm product as parent part.
9.1.2 Name the move "Clamp_Base_2_AsmFix_A1-A3_seq_inf" with a description of "Clamp Base to Fix - A1, A2, A3 hard, target plane in sequence with infinite force".
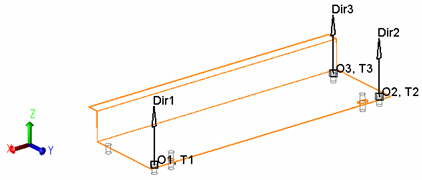
9.1.3 Click on the [ClickToAdd] button text in the Clamping Object Pts section and select points A1_Base, A2_Base and A3_Base for the Base in the Navigation Tree or from the Graph window.
9.1.4 Click on the [ClickToAdd] button text in the Clamping Target Pts section and select points A1_Base, A2_Base and A3_Base for the AsmFixture in the Navigation Tree or from the Graph window.
9.2 SMOOTHING
It can be achieved by using RSM approximation. 3DCS FEA CM delivers the displacements of selective modeling points that are linked to mesh nodes. Based on these displacements a multi-dimensional Response Surface Method (RSM) is used to "deform" the graphical representation of the solid model. RSM is for visualization purposes only and its level of accuracy is proportional with the number of points linked to mesh nodes.
Smoothing can be used in all Compliant routines, except LockDOF (which produces no deformation) to improve the graphical deviation visualization. To activate it, select smoothing check box in a compliant move.
The completed dialog box should appear as below:
9.3 If the order is incorrect utilize the Switch To drop-down to correct the order.
9.4 Click [OK] to close the Clamp move dialog box.
9.5 Save the model.
Results:
The nominal values of the measurements after clamping the Base remain unchanged.