The
See Also:
|
Specification:
Object points O1, O2, O3
Target points T1, T2, T3, T4, T5
Description:
Three points O1, O2 and O3 are picked accordingly on the object which rotates about an axis to match the target distance. These points constitute the three object points. The target points T1, T2 and T3 are picked on the target component. The target distance is set by target points T4 and T5. The steps in the move sequence from the object points to the target points are outlined below.
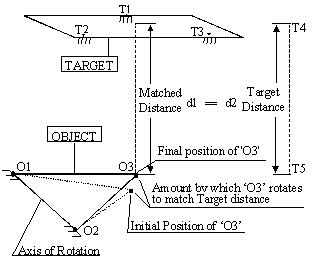
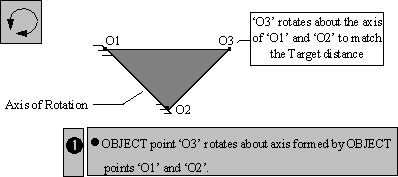
STEP 1 The object points O1 and O2 form the axis of rotation for the object component about which the object point O3 rotates.
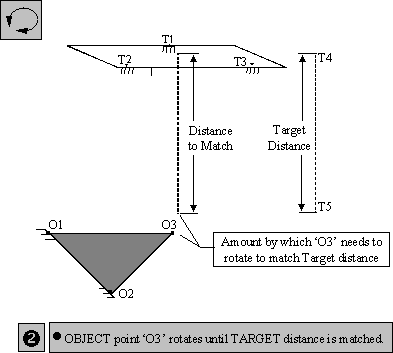
STEP 2 The object point O3 rotates about O1 and O2 until the target distance set between points T4 and T5 is matched by the distance between the object point O3 and the plane created by target points T1, T2 and T3.
STEP 3 The target points T1, T2 and T3 can be picked in different forms on the target component to match the distance between them and the object point O3 against the target distance set between points T4 and T5. The different scenarios of selecting the target points T1, T2 and T3 are as follows:
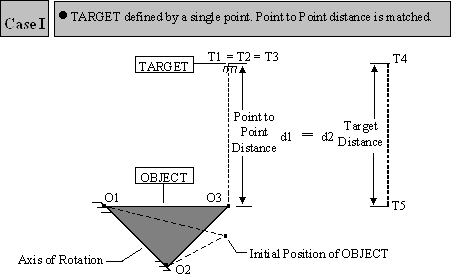
Case I
T1 = T2 = T3 > d1 = |O3T1|
In this case the target component is defined by a single point since all the target points T1, T2 and T3 are picked on the same point. Hence, the distance set between points T4 and T5 will be matched by a point to point distance between the object point O3 and the target point T1.
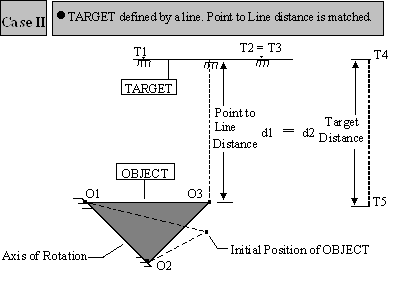
Case II
T2 = T3 (T1 6 T2) > d1 = |O3 to Line T1- T2|
In this case the target component is defined by a line since the target points T2 and T3 are picked on the same point. Hence, the distance set between points T4 and T5 will be matched by a point to line distance between the object point O3 and the line formed by target points T1 and T2.
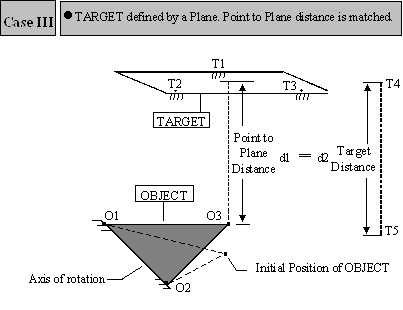
Case III
T1 6 T2, T2 6 T3, T3 6 T1 > d1= |O3 to Plane T1-T2-T3|
In this case the target component is defined by a plane since the target points T1, T2 and T3 are all different points. Hence, the distance set between points T4 and T5 will be matched by a point to plane distance between the object point O3 and the plane formed by target points T1, T2 and T3.
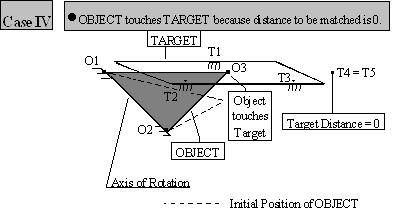
Another case exists when the points T4 and T5 are picked on the same point. Then the target distance is 0.
Case IV
T4 = T5 > d1 = d2 = 0
In this case the distance to be matched between the object point O3 and the target points T1, T2 and T3 is 0. This results in a situation where the object component touches the target component.
Creating:
Selecting Match Move displays the Match Move dialog box along with the part name.
Object Point Definition:
This move requires three object points that will move to match the distance defined by the target points. Click on All Obj to select all the three object points or O1, O2 and O3 to select the object points one by one. The object points can be selected from different parts.
Target Point Definition:
This defines the target points for the move. Click on All Tgt to select all the five target points or select T1, T2, T3, T4 and T5 to select the target points one by one. The target points can be selected from different parts. Once the target point selection is made the point numbers along with the part's to which they belong are displayed next to point and part.
Note: The Match move now provides a warning after Nominal Build if the assembly can not be built due to the input. New in 6.3.0