The
|
|
See Also: |
Example Model:C:\Users\Public\Documents\DCS\3DCS_V5_8_2_0_0\3DCS CAD & Example Models\Reference Models\Moves\Three Point move |
Specification:
Object points O1, O2, O3
Target points T1, T2, T3
Description:
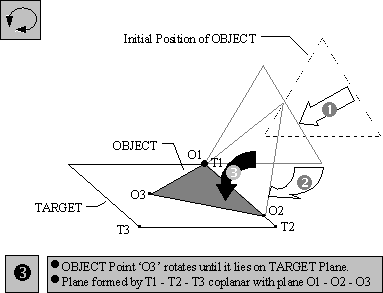
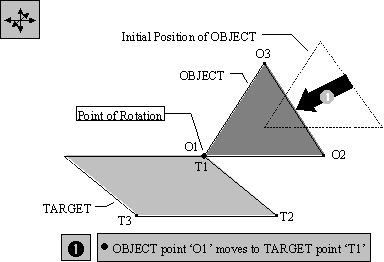
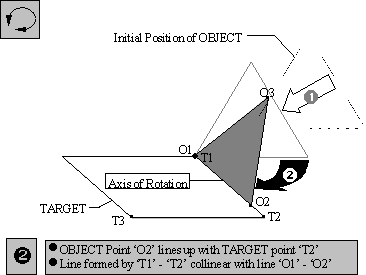
Three points O1, O2 and O3 are picked accordingly on the object component that is to be moved. These points constitute the three object points. The target points T1, T2 and T3 are then picked on the target component, respectively. The steps in the move sequence from the object points to the target points are outlined below.
1.The object point O1 moves to the target point T1. This point is the point of rotation for the object.
2.The object component then rotates about target point T1 until the line formed by object points O1 and O2 is collinear with the line formed by target points T1 and T2. This line forms the axis of rotation for the object component.
3.The object component then rotates about the axis of rotation formed by the line created from object points O1 and O2 until the object point O3 is on the plane of the target component created by target points T1, T2 and T3, making the object plane coplanar with the target plane.