3DCS contains several types of mechanical joints to give users the ability to model a large range of assembly processes. This section divides move routines groups based on frequency of use and briefly defines the routines.
Frequently used Joints
![]() Revolute locates two axes to one another, controlling four DoF's, and uses the plane constraints to control a fifth, translation, DoF (usually the tertiary locators).
Revolute locates two axes to one another, controlling four DoF's, and uses the plane constraints to control a fifth, translation, DoF (usually the tertiary locators).
![]() Cylindrical locates two axes to one another, controlling four DoF's.
Cylindrical locates two axes to one another, controlling four DoF's.
Intermittently used Joints
![]() Prismatic locates two axes to one another, controlling four DoF's, and uses the plane constraints to control a fifth, rotational DoF.
Prismatic locates two axes to one another, controlling four DoF's, and uses the plane constraints to control a fifth, rotational DoF.
![]() Spherical locates two spherical centers to one another, controlling three translation DoF's.
Spherical locates two spherical centers to one another, controlling three translation DoF's.
![]() Planar locates two features to be coplanar, controlling three DoF's (one translation and two rotation).
Planar locates two features to be coplanar, controlling three DoF's (one translation and two rotation).
![]() Point on Plane locates a point to a plane, controlling one DoF (one translation).
Point on Plane locates a point to a plane, controlling one DoF (one translation).
![]() Point on Line locates a point to an axis, controlling two DoF's (two translation).
Point on Line locates a point to an axis, controlling two DoF's (two translation).
![]() Line on Plane locates an axis to a plane, controlling two DoF's (one translation and one rotation).
Line on Plane locates an axis to a plane, controlling two DoF's (one translation and one rotation).
Rarely used Joints
![]() Universal attaches two parts at their closest ends.
Universal attaches two parts at their closest ends.
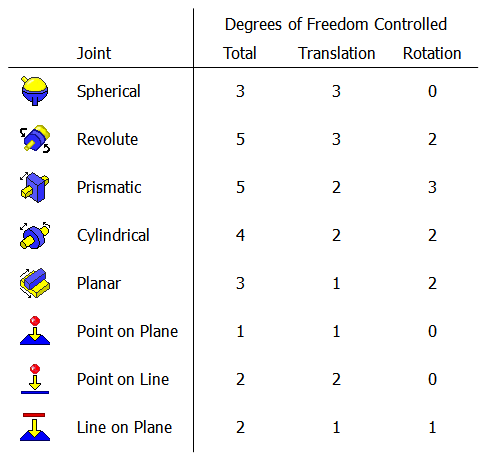
A chart summarizing the degrees of freedom controlled by each joint is shown below.