Procedure:
1.Open a model
2.Switch to the DMU Kinematics workbench.
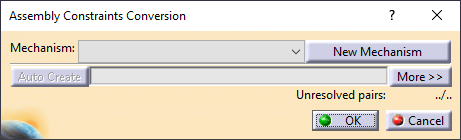
3.Start by creating a new Mechanism.
a.If the Assembly consists of Constraints, you can select the Assembly Constraints Conversion function and create a new Mechanism.
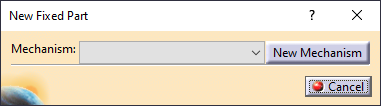
b.If no Constraints exists, start by creating a Fixed Joint and create a new Mechanism. Select a part to Fix in the assembly. This option will also create a Fixed Constraint.
|
|
CATIA V5 Joints |
3DCS Joints |
|||
Joint |
Degrees of Freedom Controlled |
Joint Name |
||
Rigid |
|
N/A |
|
|
Revolute |
|
3 Translations 2 Rotation |
|
|
Prismatic |
|
2 Translation 3 Rotations |
|
|
Cylindrical |
|
2 Rotation 2 Translation |
|
|
Spherical |
|
3 Translations |
|
|
Planar |
|
1 Translations 2 Rotation |
|
|
Point Curve |
|
2 Translation |
|
|
Point Surface |
|
1 Translations |
|
|
N/A |
1 Translation 1 Rotation |
|
||
U Joint |
|
3 Translations 1 Rotation |
|
|
Gear Joint |
|
N/A |
||
Roll Curve |
|
|||
Rack Joint |
|
|||
Cable Joint |
|
|||
Screw Joint |
|
|||
CV Joint |
|
|||